
Application Examples
Speed train GPS\Glonass navigation system based on Fastwel electronics
19.05.2014

Case Study
Introduction
In the present case study the consideration is given to the system of high-accuracy detection of locomotives location, with the help of GLONASS/GPS. The system can be used both in mainline railroad transport and industrial railroad transport enterprises which have their own fleet of locomotives and track infrastructure.
Area of application and system creation purposes
- High technology hardware and software system, designed for prompt real-time provision of railway transport traffic control systems as well as other railway automatic control and geographic information systems with data on the location, speed and direction of locomotive traffic, using GLONASS/GPS;
- Railway traffic safety;
- Automatic detection of location, direction and speed of locomotive traffic in real-time mode using digital map, which specifies layout of railroad stations and hauls’ tracks;
- Locomotive traffic control on low-density lines and stations, not equipped with signaling arrangements;
- Reduction of expenses related to maintenance and operation of railway vehicles due to the improvement of locomotive use efficiency, reduction of locomotive empty runs, fuel consumption control;
- Automation and improvement of traffic control quality processes and reduction of human factors;
- Lowering costs for shunting works at stations.
System functions
System functionalities in conjunction with capabilities of the other related systems enable to fully automate control of train service and shunting works performed for rail vehicles, as well as to provide an automated remote control of fuel consumption and locomotive operation parameters. Key functions which can be carried out by the system, combined with the above mentioned fuel consumption and station operation control systems, are described as follows.
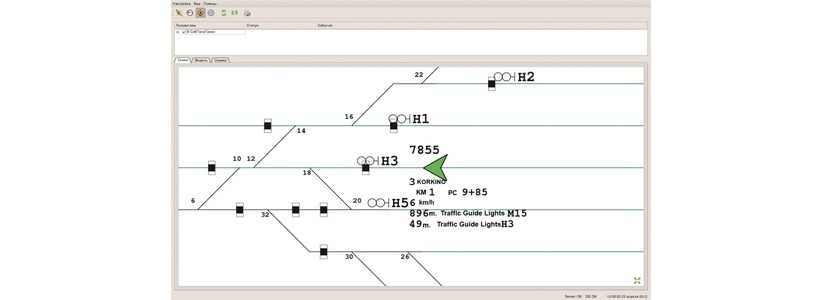
- High-accuracy detection of location, direction and speed of locomotive motion in real-time, and display of current location on digital map of track layout on the screen of operator’s PC.
- Reproduction of locomotive traffic pattern track over the required period of time, up to 3 years.
- Displaying and recording events to the data storage (start and end of downtime, time of departure from and return to a loco depot, time spent on the tracks of counterparties, power unit switching-on and switching-off time, time and places where the railway vehicle departures and returns to the tracks etc.).
- Automatic generation of reports on operation of locomotives and crews, including those related to the working time of locomotive’s power unit, fuel consumption, downtimes in working and non-working conditions, distance travelled from the time of last repairs or maintenance, time spent on the tracks of counterparties, compliance with the prescribed speed limit, accomplished traffic schedule tasks, switching locomotive to non-working condition and back, detach (attach) locomotives from trains, change of crews etc.
- Automation of key operations with trains, including registration of train arrival to stations, preparation of documents for newly arrived and marshaled trains, control collection of rail cars in a railway yard and calculation for completing to marshal rail cars into a train in accordance with the standards, control of operations for changing rail cars with approaching lines of counteragents, control of rail car location on approaching lines of an enterprise etc.
Basic structure and functions of system components:
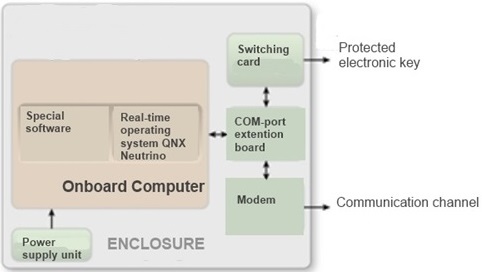
The system includes two main parts: onboard equipment, which is installed directly in locomotives, as well as tower equipment.
The onboard equipment unit is made on the basis of real-time operating system QNX Neutrino and FASTWEL CPC308 processor module in PC/104 form-factor. The choice of FASTWEL СРС308 as a computing kernel can be explained by an optimal performance and price ratio, extended operating temperature range, conformal coating, shock and vibration resistance, as well as support of QNX operating system. The module can be also configured with passive cooling, RS-232 and RS-485 interfaces, as well as connector for CompactFlash-cards.
The processor module is the core of the onboard equipment unit, which also includes:
- Fastwel PS351 Power Supply Module;
- Fastwel NIM351 Interface Module;
- Fastwel CNM350 Communication and Navigation Module.
The tower equipment of the system includes the following components:
- QNX-server of the system;
- Dispatch clerk’s PC;
- Equipment units of remote stations.
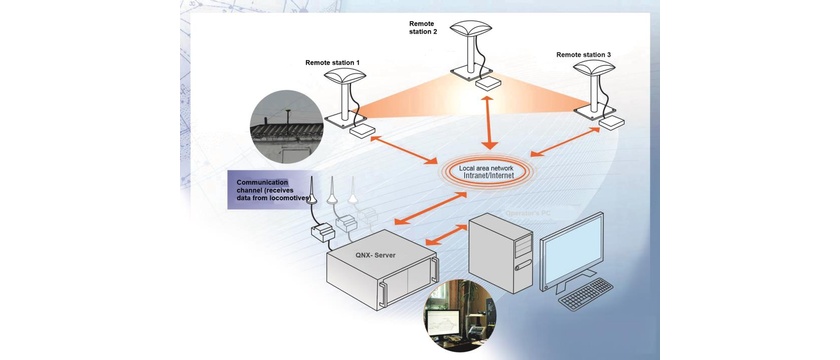
The system operates as follows:
- The onboard equipment gathers data from parameter control sensors installed in a locomotive, performs initial data processing, generates data packages and transfers them via GSM wireless channel to QNX-server of the system;
- QNX-server receives information from locomotives with onboard equipment units and information from the equipment units of remote stations;
- QNX-server performs real-time processing of data obtained from the onboard equipment and remote station equipment units, detects location, direction and speed of locomotive traffic, records coordinate, time and service information as well as information on locomotive operation parameters to the database, and transfers such information to the operator’s PC and related systems.
- From the database, via the Ethernet-channel (it makes possible to use the existing communication lines), the operator’s PC obtains information on the location, direction and speed of locomotive traffic, as well as information on the events happened (start of the motion, failure to stay in the prescribed boundaries, entry to and departure from the territory of counterparts etc.) and in accordance with operator’s desire, shows it on the digital map or track layout of the implemented facility.
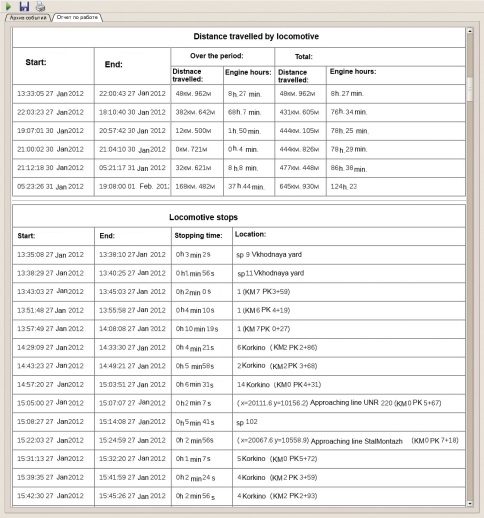
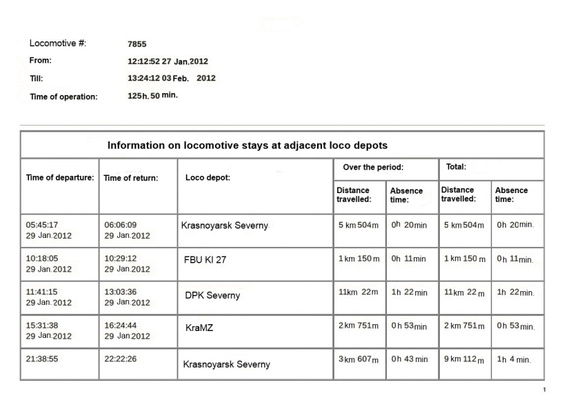
The operator’s PC software enables to reproduce the pathway of the selected locomotive, to generate, display and print out various reports on facility’s operation, mentioned above. Form of the report on locomotive’s travelled distance and stops, displayed on operator’s PC, is demonstrated on the picture above. Form of the report on locomotive’s stay at adjacent loco depots, which is prepared for printing out, is shown on the picture below.
Provision of the required accuracy and promptness of data submission and processing, calculation of the location simultaneously for several locomotives should be made in real-time mode; therefore the server operates under QNX Neutrino real-time OS. Using QNX Neutrino enables to achieve a high reliability level of system operation. Task priority levels and method of their planning, peculiar to this real-time operating system, provide multithread data processing with previously determined operation cyclogram, and its multicore architecture provides the required system performance.
Summary:
There is a truly huge potential for system development to solve various tasks of railway transport. Information obtained through the system can be used:
- For designing system of automatic reporting on trains approach to railway crossings;
- For designing systems which automatically bind locations where defects in the track-bed structure elements, subgrade and overhead contact systems have been found, using the means of non-destructive testing;
- For designing systems of track works automation using track machines and equipment;
- For designing automated systems of accounting and control for the fulfillment of locomotive planned repairs and maintenance schedules tasks;
System implementation along with the above mentioned systems at mainline and industrial railway transport enterprises, will enable to:
- Considerably reduce manual work related to entering and processing of information;
- Improve promptness and quality of locomotive motion control;
- Reduce costs for operation of locomotive fleet;
- Increase efficiency of locomotives’ and rail-cars’ use;
- Sufficiently reduce the number of failures made by people, and occurring during the motion control process;
- Improve railway traffic safety by means of the more accurate location detection as compared to the signaling arrangements, currently used in railway transport.
-
 Sản phẩm 2018 file (6,3 mb)
Sản phẩm 2018 file (6,3 mb)
-
 Sách Trắng Khoa học Kỹ thuật
Sách Trắng Khoa học Kỹ thuật
-
 Blog
Blog
-
 Ví dụ về Ứng dụng
Ví dụ về Ứng dụng
-
 Bài báo
Bài báo